数字控制步进液压缸(也有称数字液压缸,数字缸)及其技术解析 ... ... ...
热度 20 ||
郑重声明:本文汉字都是本人原创,转帖复制,要注明作者。绝不是外文资料翻译!
数字控制步进液压缸,有时也被称为数字缸,数字液压缸。其实,它的基本系统结构是步进电机(或脉冲控制方式的伺服电机)+液压直线放大器(机液伺服机构),下面称之为:步进电机+液压直线放大器(机液伺服机构)。这个称呼能够反映出它的工作原理与结构。
步进电机+液压直线放大器(机液伺服机构)的实用结构诞生时间没有具体考据,但是可以确信早于1986年已经是销售产品。
我们不禁要问,它为啥没有获得广泛使用呢?这个问题不妨留给你吧!
这里我说说液压直线放大器的情况,我浅薄地给解析其中的技术关键。
原本我没有这个想法,只是偶然间我一时兴起,依据个人经验,发布了随意的评说,我突然觉得自己有义务把这个曾经被遗忘的技术方法解释清楚了,否则又怎能说自己是为了让懵懂青年和外行热心人士认识这种实用结构(技术)的本原呢。这种责任让我花了一番心血和时间。效果如何?还是留给您评说吧!
1.外文名称
我如下翻译,大家认可否?
Electro hydraulic Linear Amplifiers 电液直线放大器
NC-Valve 数控阀
2. 产品外观
图1 外观图
3. 系统结构与组成
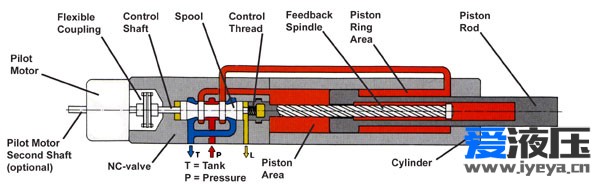
图2 系统结构图
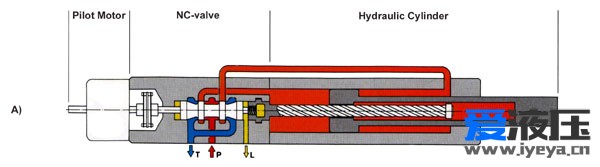
图3 系统组成图
4. 系统工作原理

图4 逆时针转情况

图5 顺时针转情况
5. 系统方块图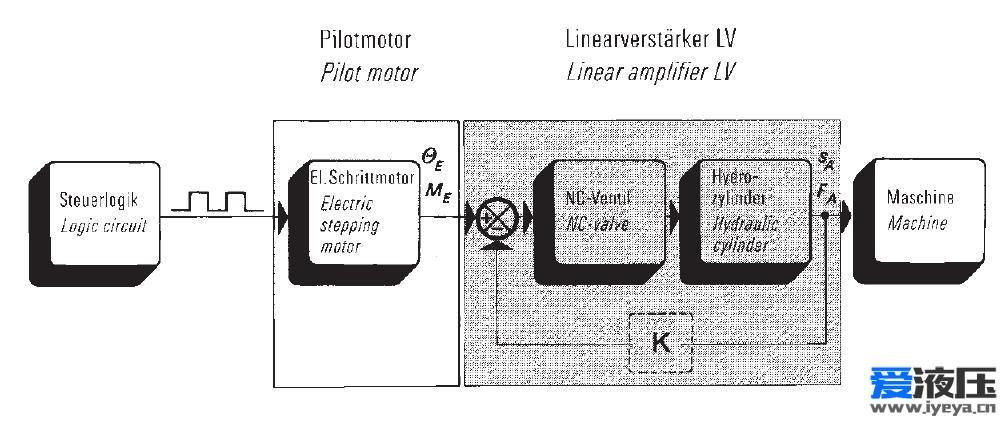
图6 步进电机+液压直线放大器系统方块图
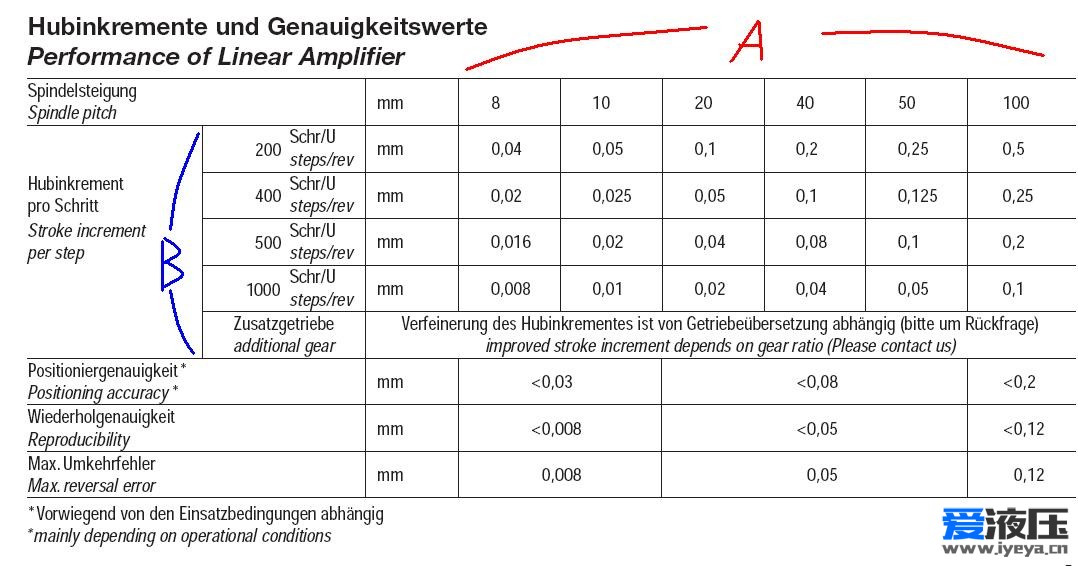
6. 直线液压放大器性能参数应用步进电机情况,液压直线放大器性能参数见表1。
表1 液压直线放大器性能参数
7.1位置精度的获取
7.1.1 步进电机+液压直线放大器(机液伺服)系统,如何获取位置精度?
系统依据如下两点获取精度
(1)利用机液伺服的反馈控制原理,让液压缸跟踪位移传感器(活塞处丝杆螺母)。反馈机械位移传感器精度高,则机液伺服系统容易获取更高精度。详见自动控制原理。
(2)利用位移传感器丝杆转一圈,需要步进电机的脉冲数目多提高精度。也就是依据增加每转脉冲数提高精度。见表1中B(蓝色)组参数。
7.1.2 机械位移传感器(活塞处丝杆螺母)如何获取精度?
它是依靠减小丝杆螺母的螺距(spindle pitch)提高精度。见表1中A(红色)组参数。
小螺距精度高,大螺距精度低。
7.2 位置精度的限制上述获取位置精度方法有无限制?是不是可以无限制提高系统位置精度呢?答案是肯定有限制的,主要限制因素如下(这里没有全面讨论,只是明显主要):
(1)按自动控制原理,机液伺服系统的跟踪精度取决于构成闭环的各个环节情况,其中位置传感器影响是很大的。但是,系统跟踪精度不仅仅取决于位置传感器精度。例如,电液伺服系统采用MTS的2微米精度位置传感器,系统位置精度并不能够达到(甚至不能接近)2微米精度。
关于反馈控制系统对系统精度影响可以参阅自动控制原理教材,也可读鄙人拙著《液压控制系统》。这里不再赘述。
(2)步进电机可以接收的不产生失步的每转脉冲数是有限制的,特别是在正反向频繁交替工况(如高频振动)。
表格1中最大数值,1000steps/rev, 1000脉冲/转。估计这数据应是工业可靠应用参数,这个数值看来不是很大。注意到这个公司是数控机床加工企业,应该可信。
(3)螺纹位置传感器参数选定需要兼顾精度与速度关系
为了保证较高动态时,步进电机不失步,一般步进电机转速不高于1rev/s,1转/秒。
下面,1rev/s, 1转/秒为参考,依据表1。
螺距8时,速度8mm/s, 480mm/min。 注意到种情况, 精度0.03mm
螺距100时,速度100mm/s, 6000mm/min 。 注意到种情况, 精度0.2mm
精度与速度关系见图7,这是螺旋机构的固有本质特性,《机械制造工艺学》机床夹具篇章特别说明了这项缺点。
对于步进电机+液压直线放大器(机液伺服)系统,单独探讨精度是不完善的,应该与最大工作速度联系起来。
其实,这个系统的最大速度还应该与其行程联系起来,不解释了。
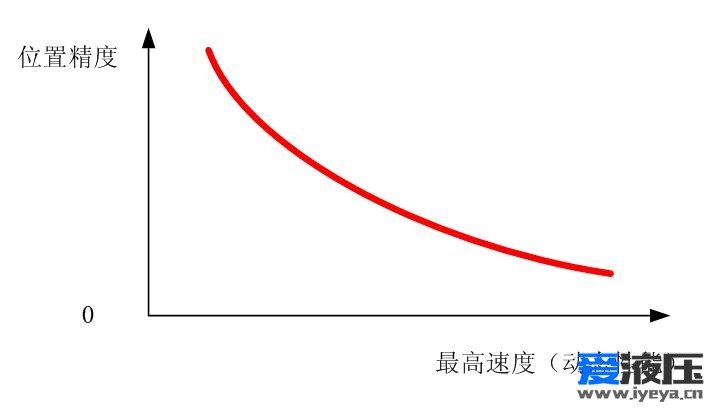
图7 步进电机+液压直线放大器精度与速度的关系图
(4)提高螺纹机构传动精度也不是无限的
举个例子,螺旋测微仪是大家熟悉的,它的测量精度能达到1微米。为啥达不到0.1微米?
况且,达到1微米测量精度也是有条件的,就是测量头接触被测物体时,必须用尾部那个小加力旋钮使测量头靠紧被测物体,控制靠紧被测物体的力大小。
否则,你大力旋动带有刻度的那个螺套,你会读出差别很大的错误数值,这种使用螺旋测微仪的行为是被禁止的。
在受力不同的条件下,螺纹机构传动精度也会改变,这是接触式机械传感器的缺点。
图2所示结构中,活塞的位置检测是通过转角实现的,也就是活塞平动需要变成转角。活塞是主动件,螺杆是被动件,因而螺距不能太小。螺距越小,作用力越大,当螺距足够小,螺纹机构自锁,作用力很大,趋向无穷(理论)。
图2所示结构中,位移传感器螺母一定会对螺杆有力的作用。
(5)从减少螺纹机构作用力,螺距不能太小。从这一点上看,表1中螺距数值也不能随意选择小的,也就是系统精度高的。
(6)表1中的误差是否考虑了,螺旋丝杆间隙产生的误差?
在实际操作过程中,消除间隙调整非常重要,调整太紧,间隙调整效果好,但是步进电机负载增大。调整间隙太松,则受力后,间隙变大,影响精度。
注意:螺杆受力是不可避免的,也未必很小,当螺距减小时。
7.3 系统动态响应(快速性)问题7.3.1 步进电机+液压直线放大器情况
对步进电机+液压直线放大器系统,很多学者和机构没有探讨其动态响应问题,为什么呢?
原因是不便于对它探讨动态响应,而只能用最高速度来描述。最高速度不高,系统动态能高吗?所以用最高速度估计一下系统动态还是合理的。
这里浅析如下:
步进电机+液压直线放大器(机液伺服)的结构,步进电机与机液伺服系统的关系是串联的。这个系统的动态由步进电机的动态与机液伺服系统的动态两部分构成。
若结构参数齐全,机液伺服系统的动态是可以自行分析,也是可以用Bode图等明确表示的。需要指出高的机液伺服系统动态特性是需要经过系统调试获取的,不是随便就能得到的。
需要特别指出,经过细致精密调试的机液伺服系统的适应性会较差,当负载等因素改变时,机液伺服系统会不稳定,根本不能做成一个通用部件,用在很多地方。
步进电机的动态就比较麻烦了,步进电机动态性能只能由步进电机厂家提供。
问题是您见过步进电机厂家提供的步进电机动态特性描述吗?您见过步进电机的bode图吗?为啥他们不提供呢?这个问题留给大家吧!
7.3.2 伺服电机+液压直线放大器情况
当需要高系统动态时,用伺服电机取代步进电机可行吗?这是您关心的问题。
伺服电机+机液伺服方案的系统动态会比步进电机+机液伺服方案好很多,但是这时需要考虑成本问题了。
(1)步进电机+机液伺服系统(见图6)的生产成本会有优势。相对于直驱阀(比例伺服阀)构成的电液伺服系统。
(2)伺服电机+机液伺服系统(见图8)的生产成本可能就没有(明显)优势。相对于直驱阀(比例伺服阀)构成的电液伺服系统。
(3)若是再增加一个位移传感器,构成伺服电机+机液伺服系统之外的大位置闭环(见图9)。则成本优势就没有了。倒是直驱阀(比例伺服阀)构成的电液伺服系统可能会有成本优势。
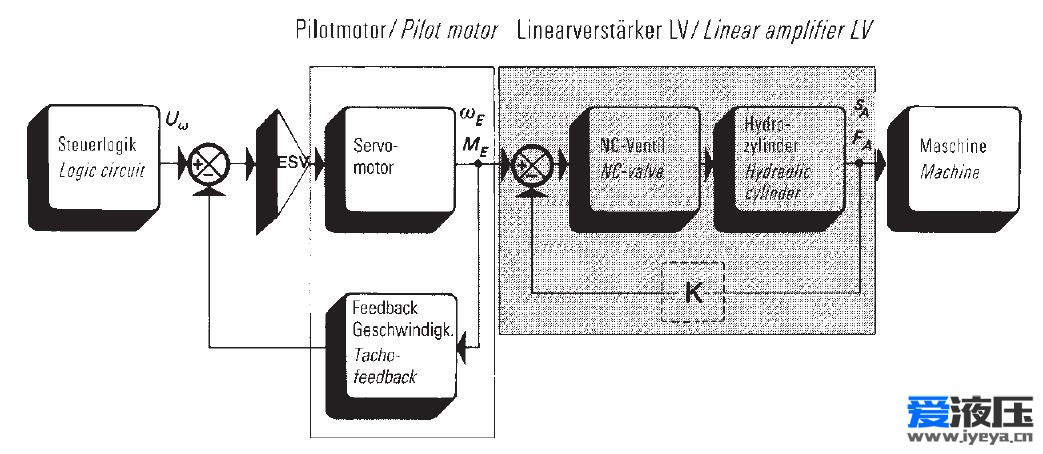
图8 伺服电机+直线液压放大器构成开环系统
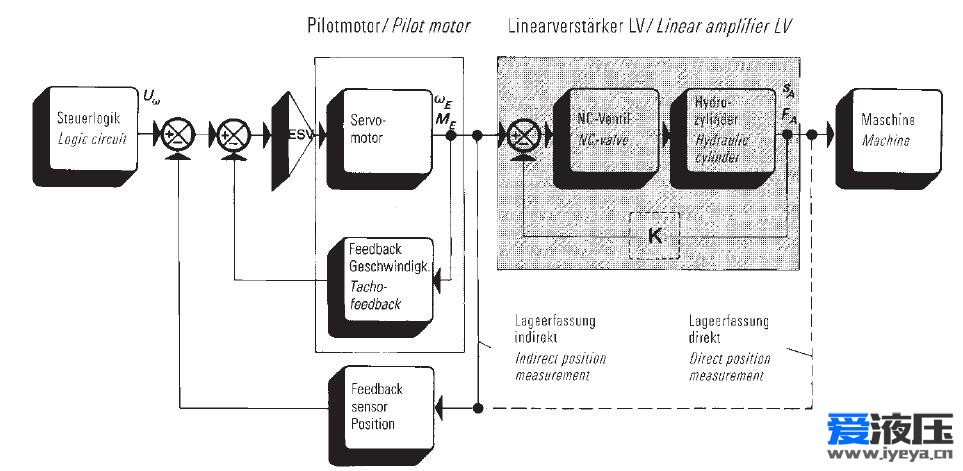
图9 伺服电机+直线液压放大器构成位置大闭环
8 定性评估
液压系统可分为液压传动系统(Hydraulic power transmission system)和液压控制系统(hydraulic control system)。
严格分类,数控步进液压缸是液压控制系统中的机械液压伺服控制系统,是一种阀控缸伺服控制系统,是一种机械闭环控制系统,是一种液压控制系统。必需明确,数控步进液压缸不是液压传动系统。
8.1 与液压传动系统的性能比较
数控步进液压缸是一种阀控缸伺服控制系统。因而,它具有液压伺服(反馈)控制系统的优点,位置控制精度较液压传动系统好,动态响应也较液压传动系统快;同时,他也具有阀控液压伺服控制系统的缺点,那就是阀控伺服系统效率低(参见常同立著《液压控制系统》第87页),效率低于液压传动系统。
8.2 与电液位置伺服系统的比较
鉴于机液伺服系统的反馈比较环节采用机械方式,因而,机液伺服系统通常只采用比例控制(参见常同立著《液压控制系统》第151页)。相比较电液位置伺服系统,系统校正与补偿方法单一(参见常同立著《液压控制系统》第210页)。因而影响了通过机液伺服系统校正与补偿方式提高控制系统性能的途径与能力。
为了保证系统稳定性,系统开环增益一般比同规格电液伺服小(参见常同立著《液压控制系统》第150页)。因而机液伺服系统精度和快速性均较同规格电液伺服系统差。
9 应用特点分析
液压控制步进液压缸采用位置反馈一般用作定位或同步。
9.1 在液压伺服控制领域
在位置精度性能要求较低,特别是动态响应不高的伺服控制领域,数字控制步进液压缸可替代电液伺服阀控位置伺服系统。
9.2 在液压传动领域
在系统效率允许较低的情况下,数字控制步进液压缸可以替代同步阀等控制的液压传动系统(开环系统)。用闭环系统替代开环系统,由于反馈存在,控制精度上有优势。
以上是个人浅薄看法,欢迎坛友、师长、朋友指正。
刚表态过的朋友 (0 人)
全部作者的其他最新日志
发表评论 评论 (26 个评论)
- 回复 yangshixiang
- 常教授,高啊!佩服,这才把问题说到点上了。先赞一个
- 回复 yangshixiang
- 你提的问题都是我碰到过的问题,所以发展艰辛,长达数十年,有些问题可以谈谈看法共同探讨,有的问题不宜在网上讨论。如有机会欢迎来京直接交流。愿意接交你这样求真知的朋友。
- 回复 数字液压
- 常教授分析的非常好,第一代的数字液压缸就是依据这些原理实现的,但它存在如常教授分析中的一些不足,所以我们就研究是否有改进的空间,于是就有了后续的发展,但限于目前我们仅公开了早期的产品,还没法讨论得太深入,请见谅,毕竟我们要靠这些生存和发展。目前比较好的德国步进电机基本都可以做到10000步/转,转速也可以达到5-10转/秒,另外伺服电机高速特性会更好,只是价格稍高。
- 回复 changtongli
- 汉字是我写的,不是国外资料
854619267: 国外的资料,有数据、有原理、看起来就是舒服
- 回复 yangshixiang
- 你提供的产品好像是瑞士的,买到过中国,价格很高。另外用到超高精度不如伺服,用到一般精度价格无优势,当时数控提供也不普及。还得一套电系统。反馈看是简单,制造极难,增加了成本。目前我们这些问题都解决了。
- 回复 yangshixiang
- 液压伺服系统,绝大部分毫米级或丝米级已经足足够用了,这时候工业精度的数字缸优势极大,不但价格便宜,而且使用可靠,最主要是几乎没有调试环节。
- 回复 yangshixiang
- 常教授分析非常正确,我们怎么避开这些缺陷呢?我们认为:
液压系统90%都没有动态响应要求,绝大部分是速度控制、位置控制和同步控制,在这三方面数字液压的优势极大。在超高精度位置控制上(微米级),数字液压也不逊色,在超高频振动控制上(近千赫兹),我们采用另外的方案也有优势。在在超长行程上,更有优势。我们的方法是不同的领域用不同的方法解决,也就是杀鸡用鸡刀,杀牛用牛刀。
- 回复 yangshixiang
- 我们刚交付了一只数字缸,低速每秒0.005毫米,高速每秒150毫米,调速范围早超万倍了,并且是连续可调,我想采用电反馈的伺服液压已经非常困难了。另外,由于是直接反馈闭环,所以响应非常快,只20毫秒就完成了加速,速度稳定精度非常高,也不超调,所以把数字液压推向了新高度。
- 回复 yangshixiang
- 常教授谈到MTS传感器分辨率2微米,但油缸控制精度远大于传感器的分辨率,所以很难实现2微米的控制,而数字缸脉冲当量可以实现0.5微米,因此完全可以实现微米级的控制,这也是数字液压的优势。所以认为机械闭环就不如电闭环的观点值得商榷。
- 回复 yangshixiang
- 另外,数字缸是系统,不能用伺服阀阀件的频率响应来比较,必须是系统对系统,数字缸用伺服电机控制数字缸达到几十赫兹是很容易的,而用伺服阀,常规的喷嘴挡板伺服阀也才100-200赫兹左右,而组成系统一般是阀频响的5分之一,系统也就几十赫兹了,难怪进口的20辊轧机AGC系统也才10多赫兹就够用了。所以数字缸在AGC控制中表现出了突出的优势。
- 回复 yangshixiang
- 梅教主50年前关于机液伺服系统的结论只适于当时的机械杠杆外反馈系统,当反馈进入油缸内部后,反馈比很小的时候,尤其是数字控制过后,它的优势就反映出来了,所以事物都是在不断发展和进步的。
- 回复 yangshixiang
- 由于数字液压缸有低精度、中精度、高精度和超高精度等多种,所以数字液压缸特别适用于满足不同要求的各种液压系统,尤其是超高精度的系统更有优势,我们去年调试成功的20辊轧机,带钢控制精度达到0.001-0.003的超高水平就是一个实例。另外,由于可以实现10000倍的调速,所以大大扩展了他的使用范围。并且我们还有一系列其他数字液压阀件,所以传统液压的几乎所有应用领域都可以采用数字液压了。
- 回复 yangshixiang
- 如果版主举出一个实例只有伺服电反馈系统才能解决而数字缸无法解决的实例可能更说明问题。其实我倒是可以举出只有数字系统能解决而传统伺服系统非常难解决的一些实例如:多级缸高精度同步系统,由于传统系统没有办法在油缸内部安装传感器,所以无法实现高精度同步,而数字液压却能非常方便的解决了,因为我们发明了柔性的油缸内置数字传感器,所以能解决。再有1万倍的连续可调速度控制,我想传统伺服液压也非常难解决了。还有2千赫兹的超高频振动台传统伺服阀也基本没戏了。再有亚微米级的运动和定位传统液压也难于实现了。总之,目前来看,传统伺服液压能实现的好像数字液压都能实现,而反过来好像反而不成立,这就是技术的进步。
- 回复 Ysx317
- 这才是实实在在的问题讨论,常教授列出了许多问题,都很到位,我们也一一做了解释,这才是有益的讨论。尤其是我希望对方提出一个难题,能把数字液压难倒,而传统液压轻而易举的解决,哪就更能拨倒数字液压了
- 回复 Use
- 今天、2018.8.22,我们进行了一体化的柔性数字缸测试,这是全世界第一套免调试的数字伺服系统,用了一个自制的廉价传感器安装到油缸内,用了一个极为廉价的(百元级)开环控制器,实现了油缸精确的速度控制和位置控制,速度调节近万倍(高水平伺服是400倍),传感器分辨率0.04毫米,重复定位精度0.02-0.03,一个极为简单的、免调试的数字伺服系统,不管在性能上或者价格上都让传统伺服液压望尘莫及。它将以万为单位的伺服系统直接降到以千为单位上来,并且在全世界第一个实现了免调试,这就是数字液压的巨大威力。也是中国数字液压的极大进步。
- 回复 Use
- 今天是2019年7月4号,数字液压在继续发展,免调试的数字伺服系统研发成功,完成了10万次以上的可靠性试验,数字伺服系统实现了取消专用控制器的目标,在全世界第一个实现了指哪打哪的精确速度控制和位置控制,传统伺服系统雄霸70年的液压宝座颠覆了,因为传统伺服的控制理论是瞎子摸象理论,无法实现指哪打哪的免调试,他必须要用高级控制器内建引导线才能实现速度和位置控制,为了提高精度,他必须要高速采样和高速运算,还需要高频响伺服阀和高精度传感器,并且需要复杂的编程和现场调试,这种系统抗污染抗干扰能力也极差,不但价格昂贵,而且应用麻烦,所有这些问题都限制了传统伺服的大规模推广和应用,而现在所有这些毛病几乎都被数字伺服液压彻底解决了,并且价格是前者的几分之一,所以,新的数字伺服液压将秒杀 传统伺服液压,这是不以人们意志为转移的技术进步。所以,常教授能够分析现有技术的问题,但无法解决它的问题,这就是学者与创新者的区别,希望常教授来亲自考察。