一种基于机液伺服系统的数字脉冲信号控制液压作动器的猜测 ... ...
热度 8 ||
最近一个公司的“数字液压缸和液压马达”讨论引起了我的兴趣。据厂家介绍“数字液压油缸对于使用者而言是开环的,但其内部则是闭环的高增益(刚度)负反馈系统。”;“油缸内部有传惑器,是阀控,是闭环控制”;“它是机械闭环”等信息。我猜测这家公司的“数字液压缸和液压马达”原理见图1。反馈是机械的,是阀控缸(或马达)机液伺服机构,通过步进电机接受数字信号控制。
它的优点是没有电液伺服阀,也就是避免出现电液伺服阀带来的缺点,因而制造容易,成本低,维护简便。它的缺点也是没有电液伺服阀,也就是没有了响应更快,控制更精准的优点。在一些场合,优点是大于缺点的;在另一些场合,缺点可能是不能容忍。需要恰当应用。
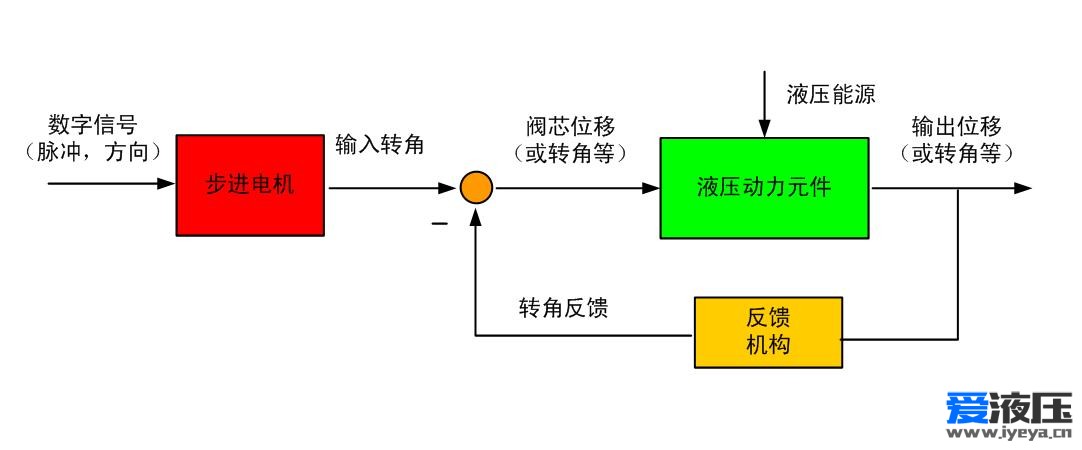
图1
数字液压马达原理结构见图2.
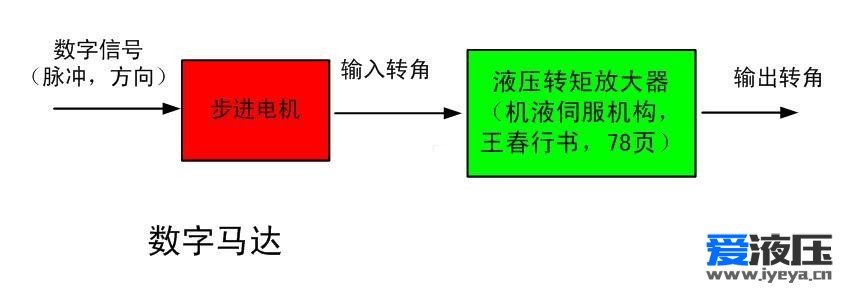
图2
所谓的数字液压缸,比较麻烦,主要是机械位移传感器。
我猜测,原理结构(细节结构可能会有区别)应该是如图3所示。
图3
上述“数字液压缸和液压马达”给出的可以接受数字信号控制,并能产生液压执行元件的机械输出,机械输出与输入脉冲有一一对应关系。则可以通过脉冲数控制机械输出量(位移或转角)。
这里数字控制液压作动器,是液压伺服的。因而具有液压伺服控制的一般特点。较好的刚度,较好的精度。而且用这样的可受控于数字控制器的液压作动器。可以方便构建复杂多执行器系统。等等这些都是优点。
这里数字控制液压作动器,是液压伺服的。因而具有液压伺服控制的一般特点。较好的刚度,较好的精度。而且用这样的可受控于数字控制器的液压作动器。可以方便构建复杂多执行器系统。等等这些都是优点。
缺点呢?首先是动态响应受限制,限制条件就是步进电机。再就是机液伺服没有电液伺服中电气的优点。还有闭环(基本是半闭环)包容内容较少。液压缸行程比较长时,机械传感器精度也较数字传感器差。
上述“数字液压缸和液压马达”的突出优点是简单和价廉(相比较,采用电液伺服阀的系统),若在动态响应要求不太高的场所,还是很有应用价值的。
实际情况是很多液压传动系统主要应用液压系统出力大的优点,对动态响应基本没要求。
很多机构和系统啊都有自己的固有特性,往往符合人们的欲望,我们就说是优点,不能满足人类的欲望时,我们称之为缺点。东西或技术无非好坏,恰到好处利用之,才是很好的设计师。
举一个简单的例子,液压千斤顶(液压传动教程的例子),用电液伺服阀控制就不太合适。很多工程机械的液压缸都驱动用电液伺服系统也不合适。
全部作者的其他最新日志
发表评论 评论 (9 个评论)
- 回复 yangshixiang
- 很有道理
ysx317@163.com
- 回复 changtongli
- 其实,它的操作非常简单。初始状态,用机械调平的方法。然后,发脉冲时,同时给这几个步进液压缸发脉冲信号。每个液压缸收到脉冲数一样,则位移一样。因而同步。必要条件是步进液压缸没有丢步。以上回答基于本条日志
- 回复 yangshixiang
- 在同步领域,还没有一个用户提出10微米的同步要求,传统伺服系统更别想了。
- 回复 Use
- back2049,10微米同步?这是没搞过同步的外行话,德国力士罗水平高,在水电领域的六缸同步采用同步马达加伺服补偿,精度毫米级都老出故障。我们的数字六缸同步最大误差0.4毫米,远超国外水平。
- 回复 Use
- 常教授对数字缸的分析很到位,但两个结论却值得商榷:1。频响不高。2,精度不高,
而实际使用的结果是:在20辊轧机的厚度控制中秒杀了世界最高水平的美国MOOG伺服阀,为什么能秒杀MOOG阀?所谓的响应应该是对控制偏差的响应,即当负载突然增大了,会引起厚度变化,而MOOG阀是通过采样周期去发现变化而实现调整的,最高就是采样周期,而实际上还有一个阀的频响限制,所以不可能超过法的频响。而数字缸是通过机械直接反馈的,从理论上是无限小的响应时间,所以说第一个结论是错误的。关于第二个结论即精度不高,这恰恰又错了,为什么?传统伺服的频响决定了最小调节位移,所以无法实现高速微动,如微米级的运动,而超精密数字缸的脉冲当量是1微米,所以可以方便的实现微米级运动,由于这两个特性,所以秒杀了世界最权威的美国MOOG伺服阀。这就是颠覆式的技术进步。