轴向柱塞泵磨损预测研究
轴向柱塞泵磨损预测研究
Research on wear prediction of piston/cylinder pair
in axial piston pumps
柱塞副是轴向柱塞泵的关键承载润滑界面,但其容易发生过度磨损,特别是在高输出压力下。因此,研究透彻柱塞副的磨损退化机理是非常重要的。本文通过将载荷和润滑参数计算模型与磨损计算模型耦合,建立了一种柱塞副磨损预测方法。通过实验对模型进行了验证。实验和仿真结果表明,在一定的周向角范围内,缸孔两端磨损严重。利用该方法可以得到柱塞副的时变磨损过程从而实现预测性维护时间的准确评估。
柱塞副动力学分析
斜盘的支撑力和柱塞腔压力使柱塞在缸孔内往复运动。滑靴的摩擦力因滑靴在斜盘上的滑动产生。柱塞副之间的微小间隙和较大的侧向力导致柱塞在缸孔内倾斜。径向运动会使油膜产生挤压效应,随着柱塞的运动会使楔形油膜产生动压效应。如果该位置油膜厚度非常小,就会产生固体接触压力。与外力平衡的反作用力因挤压效应、动压力效应和固体接触压力产生。
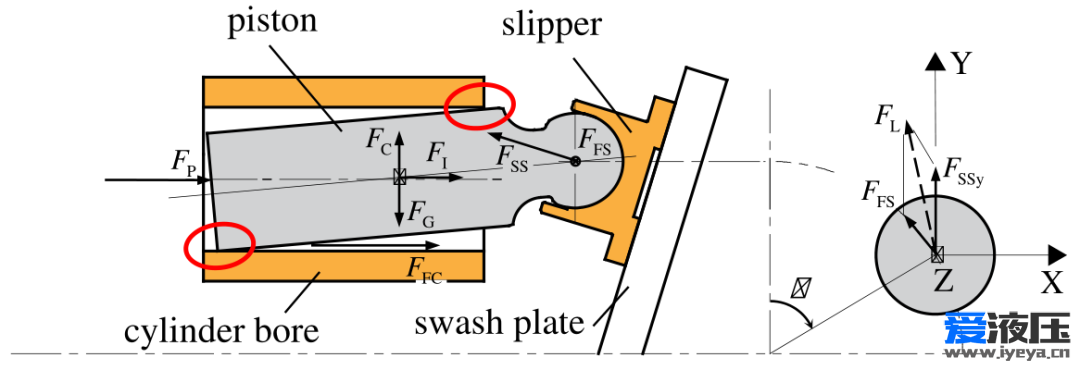
图1 施加在柱塞上的外力示意图
承载润滑参数计算
柱塞副的油膜厚度与柱塞在缸孔内的姿态有关。当表面发生磨损时,为了获得更精确的油膜厚度,必须考虑磨损深度。活塞的姿态可以用两段相对于缸孔的偏心度来表示。油膜厚度可定义为活塞与缸孔在径向的间隙。柱塞与缸孔表面接触时,会发生弹性变形。柱塞和缸孔表面有粗糙峰,因此,设置由摩擦副表面粗糙度确定的最小接触油膜厚度来估计接触是否发生。
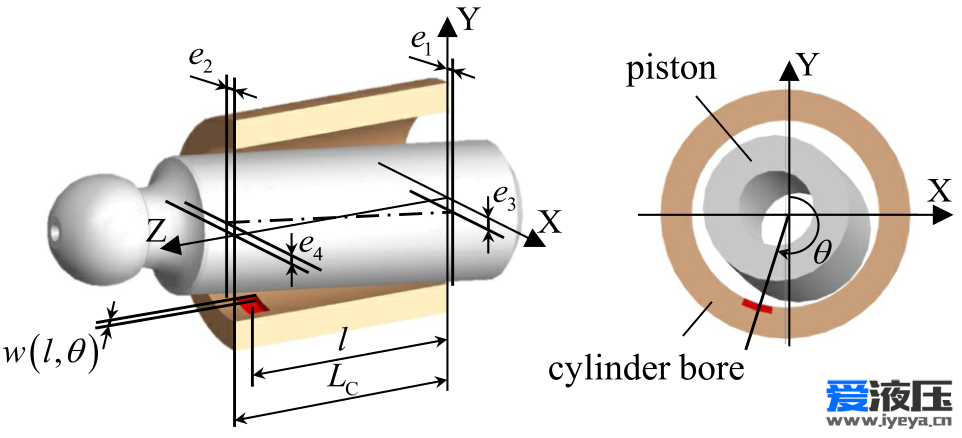
图2 柱塞倾覆状态
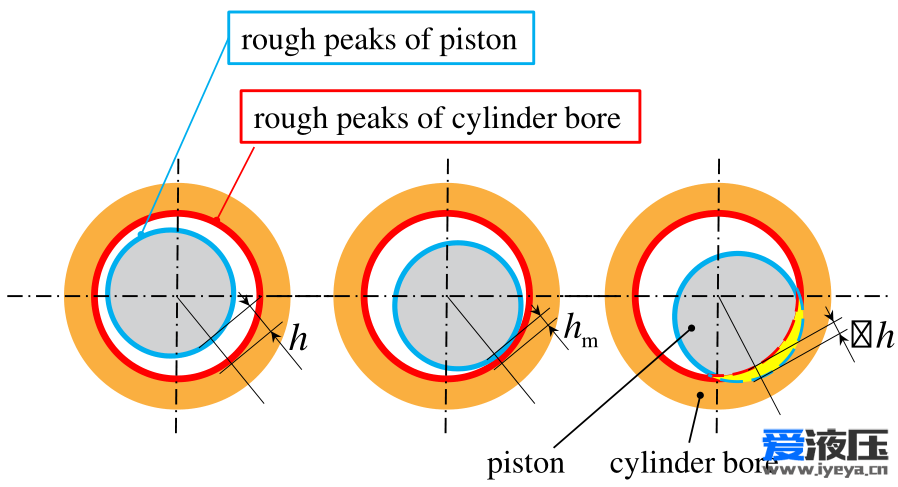
图3 不同情况下柱塞副的横截面
通过求解离散雷诺方程,可以得到柱塞副油膜的压力分布,从而确定油膜对柱塞的反作用力。然后,采用Newton-Raphson法迭代求解活塞力平衡方程。自动调整油膜厚度和厚度变化率,直到力平衡偏差小于给定的阈值。经验上,每一圈计算的承载润滑参数经过4个计算周期后都具有循环性,这表明计算是收敛的,然后输出最后一圈的计算结果。根据使用该模型的经验,模拟结果显示了3个周期左右的周期性。因此,当仿真周期数等于或大于4时,认为仿真是收敛的,输出承载润滑参数结果。
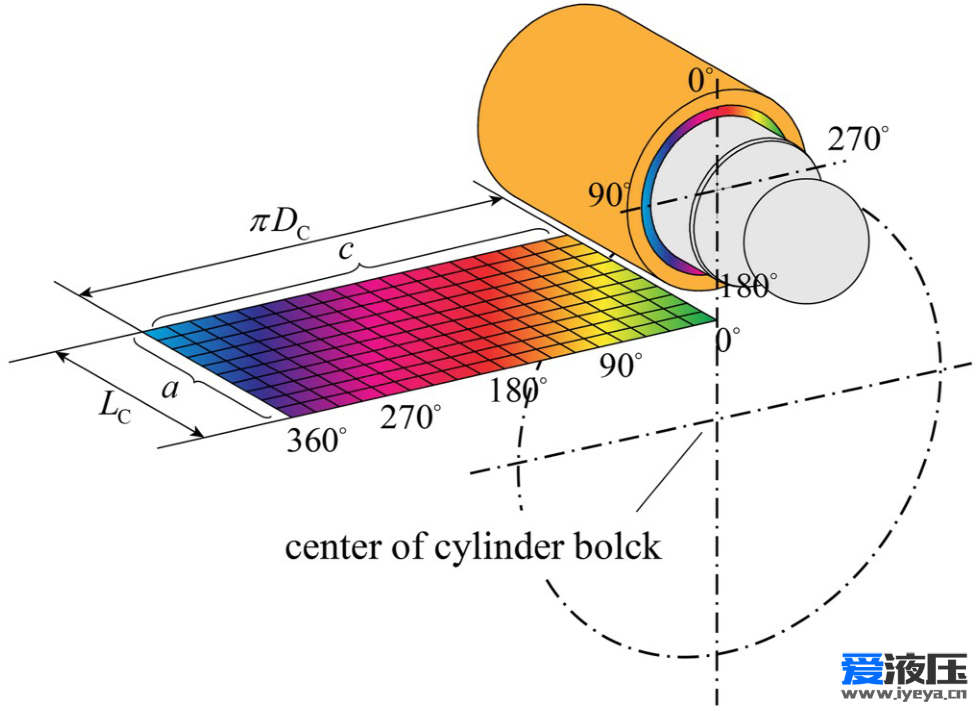
图4 柱塞副压力场网格
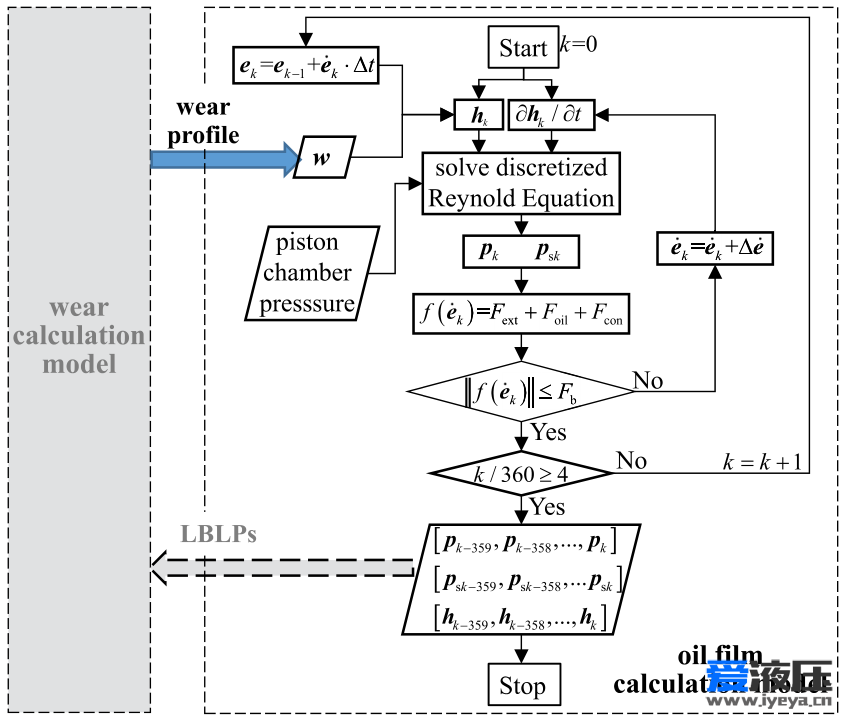
图5 承载润滑参数计算流程示意图
承载润滑参数对磨损计算的影响
承载润滑参数决定了柱塞副的承载润滑条件,如图6(a)所示,若外力过大,油膜无法提供足够的反作用力来平衡油膜。柱塞和缸孔相互挤压和滑动。当固体接触压力很大时,油膜破裂。此时,计算得到的油膜厚度可以为负值。为了表示实际情况,将油膜厚度设为零。如图6(b)所示,柱塞表面与缸孔接触的粗糙度峰值。在这种情况下,油膜尚未破裂,固体接触压力小,柱塞的粗糙峰是粘弹性的。当粗糙峰在圆柱孔上滑动时,可能需要一段时间才能变形。如果作用时间小于变形时间,则粗糙峰变形不彻底,会进入缸孔。当油膜厚度小于粘弹性变形后粗糙峰的高度时,则认为这是一种会引起滑动磨损的混合润滑条件。
在不同的载荷和润滑条件下,其磨损机理是多样的。当发生固体挤压时,粘附节点会增加。粘接节点可能导致剪切断裂和表面磨损。油膜压力不足,不能形成粘接节点。当粘弹性变形后的粗糙峰高度大于油膜厚度时,会发生滑动磨损。气缸孔的磨损深度可通过部分partial-EHL接触滑动磨损模型计算。
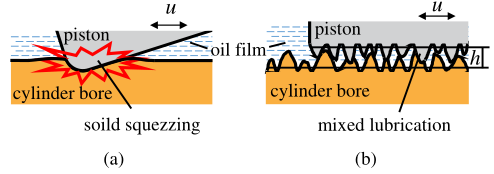
图6 柱塞副的承载润滑条件
将承载润滑参数离散到每个网格中,判断磨损机理并计算磨损深度。将每个网格的磨损深度综合为整个缸孔的磨损形貌。磨损发生后,柱塞副的表面形貌会发生变化,从而影响承载润滑参数的计算,承载润滑参数也会影响磨损过程的计算。
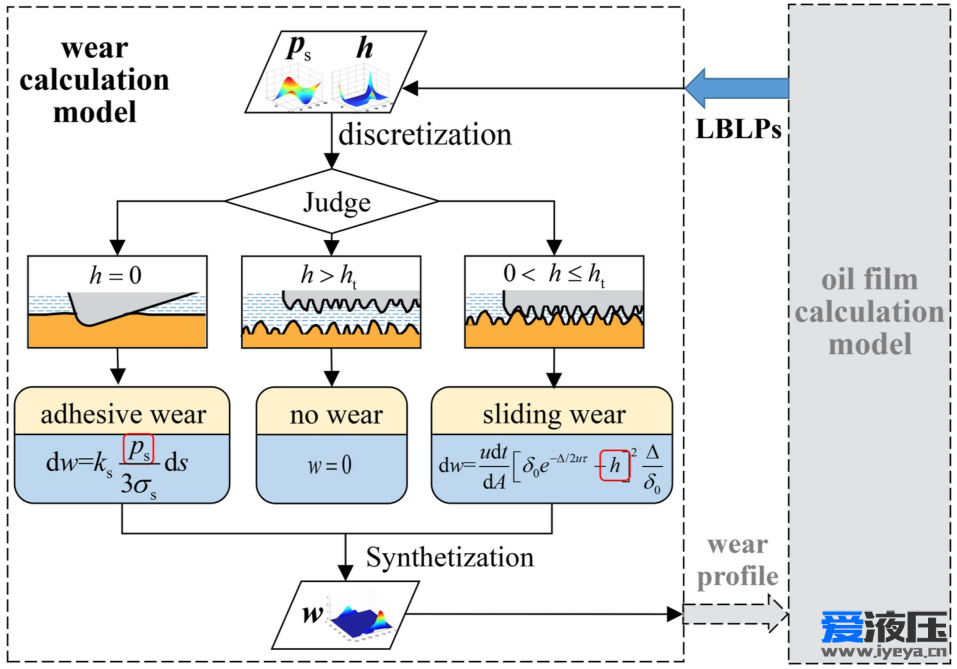
图7 磨损计算过程示意图
磨损预测方法流程
泵转一圈所产生的磨损深度不足以影响承载润滑参数,每转一圈后重新计算油膜又很费时。因此,我们设置磨损深度阈值来决定是否需要重新计算油膜。将每一转的磨损量叠加在前一个周期上,直到超过阈值,然后重新计算油膜。柱塞与缸孔的接触长度随着缸体的转动而变化。柱塞腔内压力是计算流体动力学模型需要得到的一个重要边界条件。它与泵的进出口压力等工作条件有关。基于商用CFD平台,建立了轴向柱塞泵的仿真模型。
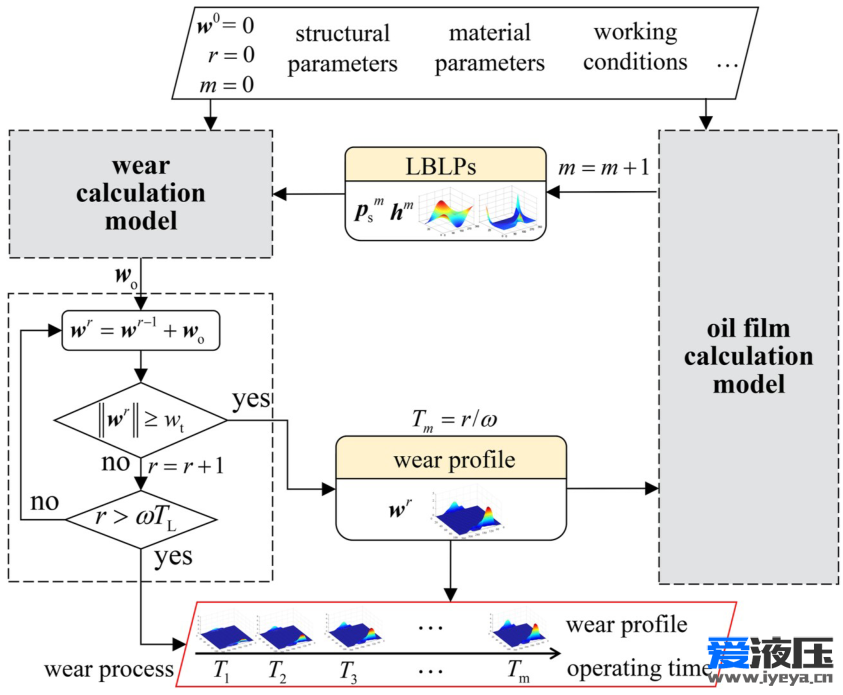
图8 磨损预测方法流程
实验验证
对某商用轴向柱塞泵进行了试验,分析了缸孔的磨损区域和相应的磨损深度。在加速寿命试验台上进行了240h的试验。加速寿命试验的试验泵加载压力比正常工作压力35 MPa高出1.23倍。
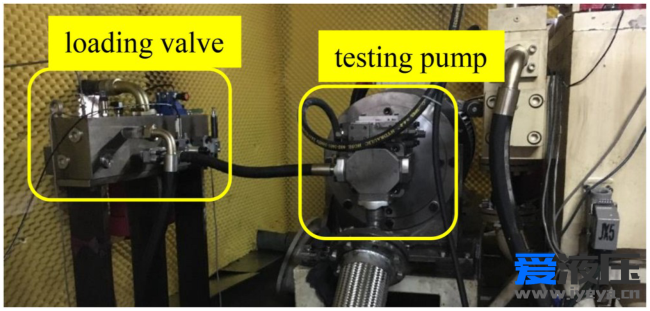
图9 试验台架
在加速寿命试验前后分别拆卸泵,取出缸体,测量缸孔的磨损情况。利用三坐标测量仪对圆柱孔的圆周轮廓进行了微米尺度的测量。三坐标测量仪探头扫描圆柱孔内壁后,得到圆柱孔上截面的圆周轮廓。该测量装置的分辨率小于1 μm,足以满足磨损测量的要求。截面的周向轮廓可拟合为整个筒孔的三维轮廓。可以推断,由于柱塞/缸孔的结构和受力条件的影响,缸筒两端附近的轴向磨损梯度比其他地方更显著。这是因为靠近圆柱体两端的测量截面比其他地方的更密集。
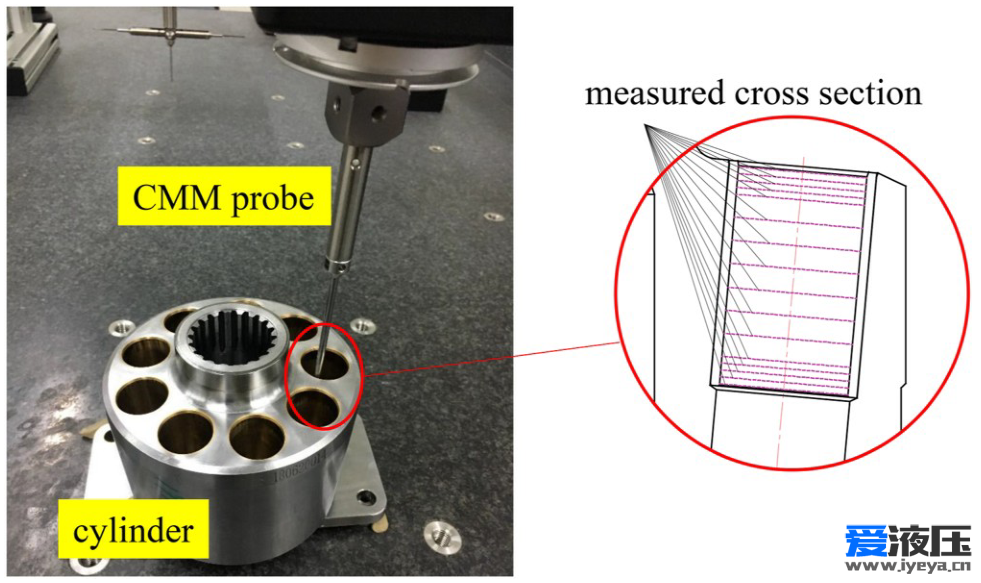
图10 三坐标测量仪测量过程
经三坐标测量仪测试,试验前缸孔的外形接近于规则圆柱,各截面的形状和直径基本相同,而经过240h试验后,由于磨损过程,两端截面的直径较大。通过试验前后气缸孔廓线的差异,可以得到实际的缸孔磨损曲线。用同样的方法测量被测活塞表面,未发现明显的磨损剖面。
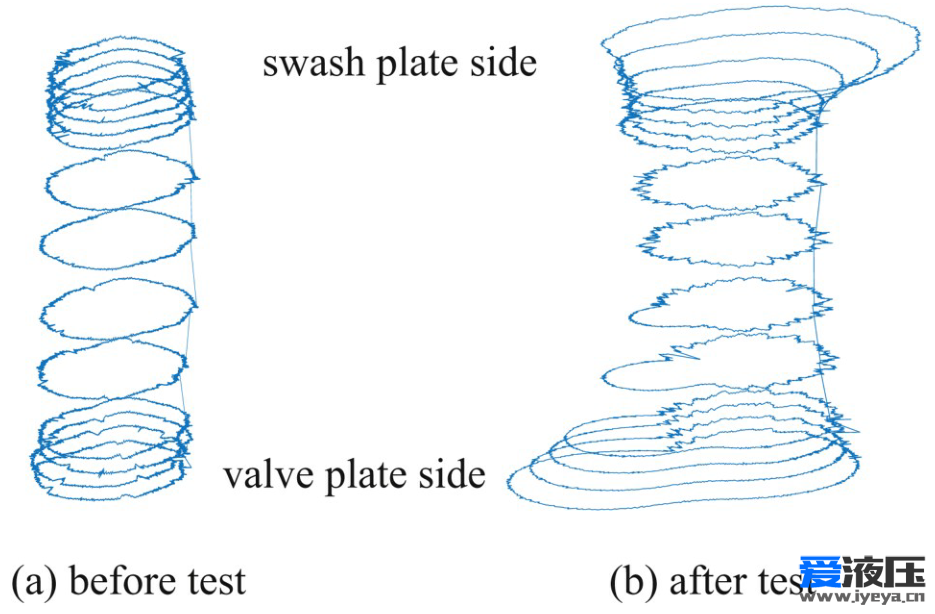
图11 试验前后缸孔轮廓测量结果
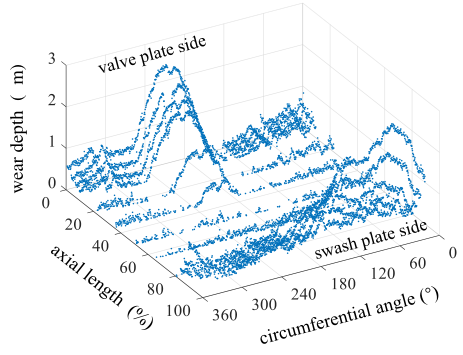
图12 缸孔轮廓磨损曲线
磨损系数的确定
在粘着磨损模型中,粘着节点形成概率系数的确定是相当困难的,因为它随不同的承载润滑条件而变化,目前没有选择它的理论标准。其对磨损部位的影响较小,但对磨损深度的影响较大。因此,此系数的确定对磨损计算至关重要。利用测量结果确定此系数,模拟结果与实测结果的差异反映了选取值的适宜性。差异越小,则其值越合适。残差平方和被广泛用于衡量两个变量之间的相关程度,可定量描述模拟结果与实测结果的差异。当残差平方和值达到最小值时,模拟结果与实测结果最接近。
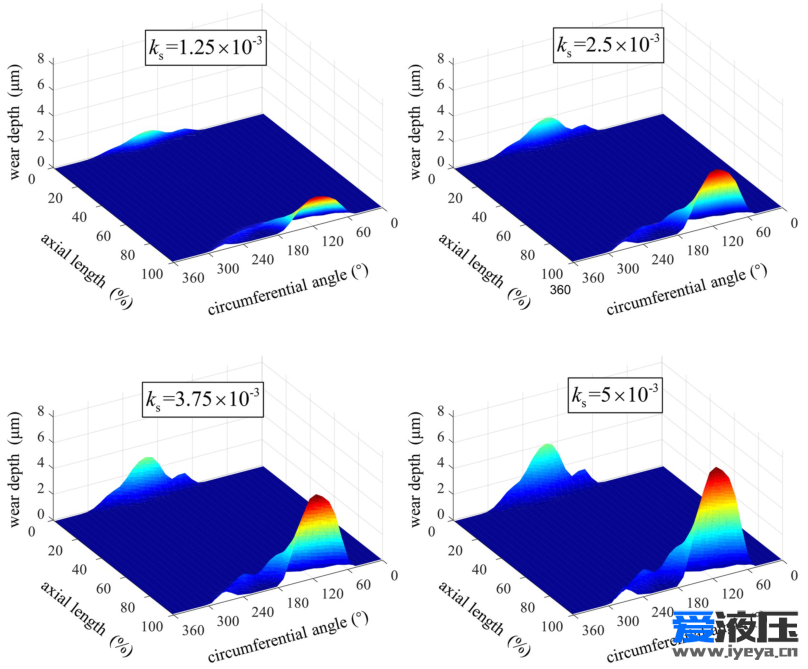
图13 粘着节点形成概率系数对仿真结果的影响
模拟结果与实测结果对比
仿真和实测结果均表明,缸孔末端附近是磨损最严重的区域。然而,两个峰值的周向角是不同的。测量结果表明,配流盘侧周向150°~250°存在严重磨损。斜盘测轴向-50°~180°存在验证磨损。可以看出,模拟结果与实测结果基本一致,但仍存在一些偏差。承载润滑参数仿真模型建立在几个假设的基础上,这些假设必然会导致仿真工况与复杂的实际工况之间的判断存在偏差。磨损模型与实际磨损机理存在差异,如油液中金属颗粒微小,忽略了磨粒磨损。该模型的精度可接受,可用于研究柱塞副的磨损过程与工作参数和结构参数之间的关系,对分析轴向柱塞泵的失效机理和寿命预测具有重要意义。
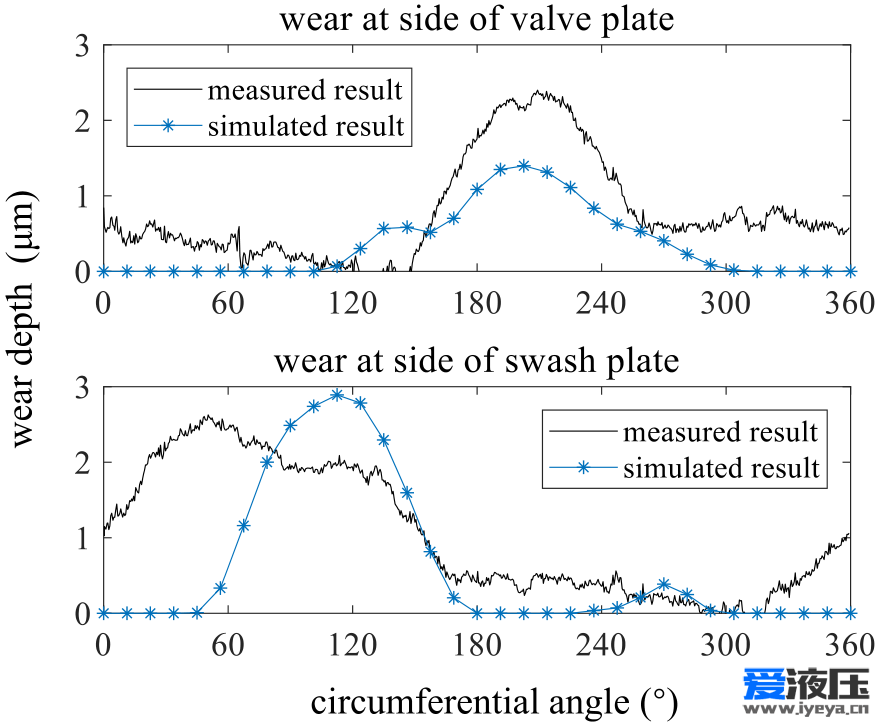
图15 缸孔周向磨损轮廓
总结
1.在240h的加速试验中,当模拟结果与实测结果相差最小时,磨损系数值为1.7e-3。
2.仿真和实测结果表明,缸孔两端磨损严重。严重磨损发生在特定的周向角范围内。
3.柱塞副的磨损过程研究有助于获得轴向柱塞泵的维修时间。
相关参考文献:
H.-y. Yang, M. Pan, Engineering research in fluid power: a review, J. Zhejiang Univ. – Sci. 16 (2015) 427–442.
N. Manring, Fluid Power Pumps and Motors: Analysis, Design and Control, McGraw Hill Professional, 2013.
S. Xia, J. Zhang, S. Ye, B. Xu, W. Huang, J. Xiang, A spare support vector machine based fault detection strategy on Key lubricating interfaces of axial piston pumps, IEEE Access 7 (2019) 178177–178186.
Y. Fang, M. Shirakashi, Mixed Lubrication Characteristics between the Piston and Cylinder in Hydraulic Piston Pump-Motor, 1995.
M. Ivantysnova, Temperaturfeld im schmierspalt zwischen kolben und zylinder einer axialkolbenmaschine, Maschinenbautechnik 34 (1985) 532–535. %@ 0025- 4495.
Kroemer, O., et al. Towards learning hierarchical skills for multi-phase manipulation tasks. in 2015 IEEE Int. Conf. Robot. Autom. (ICRA). 2015. IEEE.

