液压伺服必看:运动控制器与PLC的区别到底在哪里
在液压伺服、精密压装、多缸同步设备中,总有一个经典争议:到底用PLC还是专用运动控制器?很多人误以为“高端PLC能替代所有运动控制”,也有人觉得“运动控制器全方位碾压PLC”。其实二者从硬件架构、控制原理、设计初衷就完全不同,不存在绝对优劣,只有分工不同、场景适配不同。
今天从结构、原理、优劣、替代、互补五大维度,一次性讲透液压伺服领域,运动控制器与PLC的核心区别,看完彻底告别选型纠结。
设计定位:各司其职赛道不同
01
PLC:通用型工业逻辑中枢
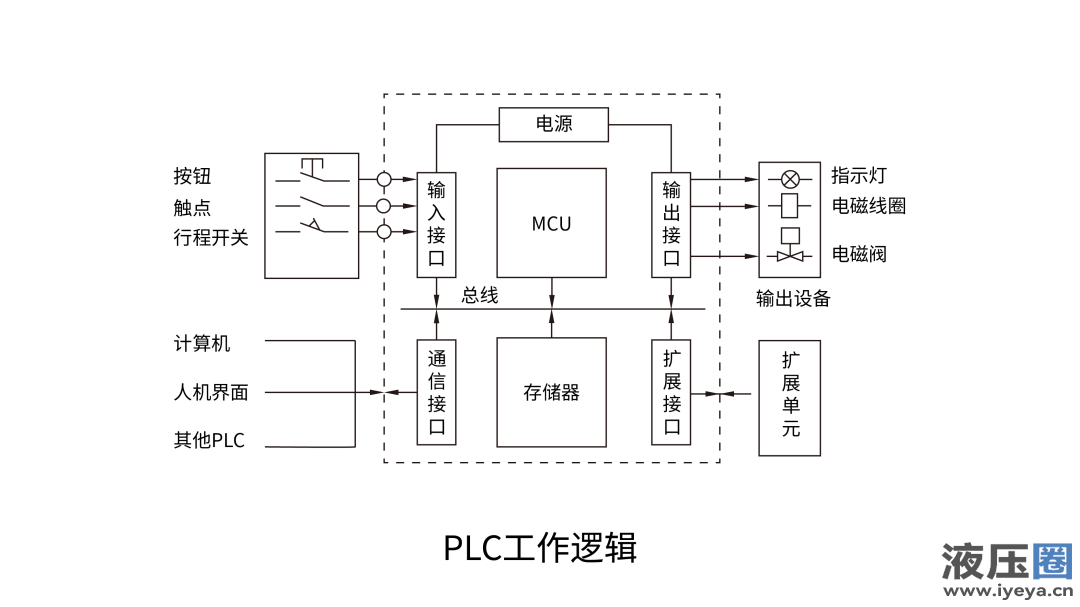
PLC的诞生核心目的,是替代传统继电器,解决设备时序、联锁、IO逻辑、整线组网问题。它是工业自动化的“通用管家”,适配全行业普通自动化设备,主打通用性、稳定性、多IO适配、强组网能力。

02
液压运动控制器:专用伺服运动核心
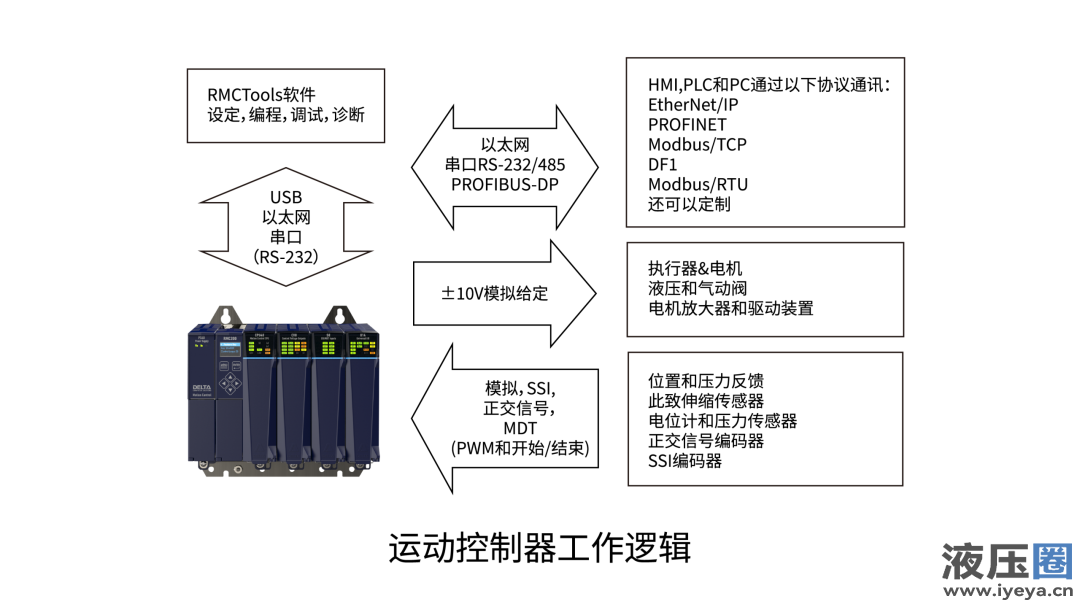
以DELTA RMC为代表的液压专用运动控制器,是电液伺服系统专属设备。专为油缸、伺服阀、压力闭环、高精度同步场景研发,不擅长繁杂逻辑,只深耕精密液压运动控制,主打高速闭环、专用算法、动态控缸。

硬件结构:通用架构VS专用架构
01
PLC硬件:模块化通用组合
核心为通用工业MCU,硬件架构标准化,由CPU、IO模块、模拟量模块、通讯模块拼接组成。整体设计侧重抗干扰、宽温运行、海量IO扩展,适配各类工业场景。但短板十分明显,模拟量采样、运动运算依赖外接模块,硬件链路长、延时高、一致性差,无法满足液压高频动态控制需求。
02
运动控制器硬件:高速运算专用架构
搭载DSP+ARM 异构专用运算芯片,摒弃冗余通用逻辑功能,算力全力聚焦液压运动闭环运算;硬件板卡原生集成 16 位高精度 AD 采样、伺服阀专用 DA 输出、磁致伸缩位移 / SSI 编码器直连接口,配套模块化 IO 插槽,减少外接转接模块。硬件闭环周期可达 50–250μs,是常规 PLC 扫描速度的数十至百倍级别,完美匹配液压油可压缩、动态响应快的工况特性。
控制原理:逻辑扫描VS实时闭环
01
PLC原理:循环扫描、串行执行
PLC采用固定周期循环扫描机制,程序自上而下串行执行,主扫描周期普遍2–20ms。处理开关逻辑、时序联锁毫无压力,但做液压伺服闭环时,存在致命短板:扫描延时固定、反馈采样滞后,无法实时跟随油缸负载、油压的瞬时变化,极易出现抖动、超调、保压波动等问题。
02
运动控制器原理:并行高速实时闭环
采用多轴独立并行运算机制,不等待主程序扫描,硬件级实时闭环。全程不间断采集位移、压力信号,实时修正伺服阀输出,可精准抵消液压系统非线性干扰。针对液压特有弹性形变、摩擦滞后、阀零漂等问题,做到毫秒级感知、微秒级修正。
算法能力:通用PID & 专属算法
这是二者在液压伺服场景的核心分水岭
01
PLC:通用算法,无液压适配
仅搭载基础通用PID功能块,油缸升降、正反负载变化只能共用一组参数。无原生前馈补偿、死区补偿、摩擦补偿功能,液压位压切换、无扰保压、多缸同步等复杂功能,需要工程师手动编写大量代码拼凑,参数调试全靠经验试错,耗时费力且效果不稳定。
02
运动控制器:内置全套液压专属算法
出厂固化成熟电液伺服专用算法,无需二次开发:双向独立PID、三阶运动前馈、伺服阀死区补偿、油缸摩擦补偿、油液弹性补偿、位置压力无扰切换、多轴电子凸轮同步等功能,一键调用、自动整定参数,完美解决液压系统非线性、不对称、易震荡的行业痛点。
优劣对比:各有长短无全能者
01
PLC核心特点:
优势在于IO丰富、扩展成本低、组网适配性强,擅长设备联锁、时序逻辑、人机交互、报警管控,是常规自动化设备的高性价比标配。短板是动态控制能力弱,高精度液压闭环、多轴同步、高速力控场景调试难度大、稳定性差,易出现爬行、震荡、超调问题。
02
运动控制器核心特点:
优势是液压伺服控制精度、动态稳定性、多轴同步性能全面领先,调试高效、设备运行一致性高、故障率低,适配各类精密液压工况。短板是逻辑控制、IO扩展能力薄弱、成本偏高,无法独立承担整机联锁、时序管控等全套自动化功能。
两者关系:替代与互补
替代关系
二者不存在双向完全替代的可能。PLC可勉强替代运动控制器,仅适用于低速、低精度的普通比例液压场景,满足简单升降、粗略夹紧、普通保压需求;但精密压装、微米级定位、无扰力控切换、多缸同步等高端伺服场景,PLC无法达标,强行使用会导致调试周期翻倍、设备稳定性差、良品率偏低。而运动控制器完全无法替代PLC,其仅专注运动闭环,缺失整机逻辑、安全联锁、组网管控等核心能力,不能单独作为设备控制核心。
互补关系
目前精密液压伺服设备的主流成熟方案为PLC+运动控制器协同工作。PLC作为上位机总管全局,负责整机电气联锁、油泵与电磁阀控制、温控报警、HMI交互、通讯组网,下发工艺启停、定位、保压指令。运动控制器作为下位执行端,接收PLC指令后独立完成高速闭环运算,精准实现油缸定位、压力控制、动态切换、多轴同步与伺服阀驱动,全程自主运算,不占用PLC资源。

结语
最后一句话总结二者核心本质:
PLC = 通用逻辑控制器,解决设备“怎么动、何时动”的时序问题。液压运动控制器= 专用闭环控制器,解决油缸“动得准、动得稳”的精度问题。PLC追求通用、可靠、全面,适配万千工控场景;运动控制器追求极致、精准、动态,深耕液压伺服细分领域。不存在谁比谁更好,只存在谁更适配场景。普通液压、常规自动化设备,PLC性价比无可替代;精密伺服液压、高精度力控、多轴同步设备,运动控制器是刚需。PLC控逻辑,运动控制器控精度,二者搭配,才是液压伺服设备的最优解。

