伺服控制专辑—控制精度
简介:控制精度可以从四个指标进行考察: 瞬时静态误差:这种控制误差是由伺服阀的误差决定的,往往是在瞬间产生,不过这种误差很少出现。例如;伺服阀分辨率和滞环,由于负载变化而引起的压力增益偏差等。 长期静态误差: ...
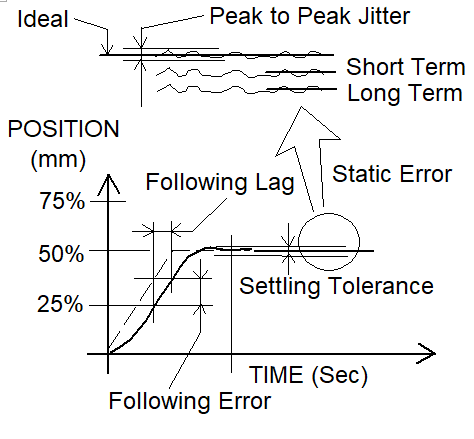
控制精度可以从四个指标进行考察: 瞬时静态误差:这种控制误差是由伺服阀的误差决定的,往往是在瞬间产生,不过这种误差很少出现。例如;伺服阀分辨率和滞环,由于负载变化而引起的压力增益偏差等。 长期静态误差:是由于温度漂移,伺服阀组件磨损等原因而引起的。最坏的情况是伺服阀样本中所有误差累加在一起。 积分的使用:积分器通常用于消除长期的静态误差。在时间平均的基础上,积分器将产生0控制误差,但这并不意味着静态误差始终为0(静态误差的平均值为0)。即使可以迅速进行校正,仍会发生类似于瞬时的静态误差(瞬时误差就是瞬间的偏差信号)。 峰峰值误差(抖动):静态和低频工作时有时可能会出现高频抖动。通常,这种情况是由于机械设计不合理,缸(或者阀芯)的摩擦力太大,游隙,电信号噪声等导致的。这种类型的误差很难计算(这种误差是非线性误差)。 跟随误差:是跟随斜坡命令时产生的(跟踪)误差。误差与斜坡速度成比例地增加,可以根据瞬间的跟随误差或跟随滞后来计算;达到指令值所需的时间。
注意: 1.控制器无法观察到任何测量形式的误差。测量误差应该叠加到控制器的总误差上。传感器误差通常属于长期误差;例如由于温度漂移。 2.实际上,对于电反馈阀,阀总的瞬时误差可能约为1%,甚至更低。长期误差可能高达10%,但一般情况下约为5%(即使有稳态误差,也并不影响阀的工作。因为电路板的PID模块会给出相应的偏差信号予以纠正) 3.可以通过积分作用(在某些情况下)或速度前馈(后面会重点介绍)在某种程度上消除跟随误差。 斜坡信号,是一阶有差系统,通过增加积分环节,可以消除跟随误差。但是系统的阶数不能太高,否则容易引起不稳定。 |

上一篇:伺服控制专辑——系统动力学下一篇:伺服控制专辑——幅频特性
已有0人参与
会员评论